I was able to get in on the early bird deal for the Omnia, so for me it was only $200 including shipping. I can safely say it’s worth every penny of it.
There are a couple outstanding bugs, like:
- certain RRD graphs not working
- A bug that affects dhclient+LXC
- kresd not supporting (or not configured for) local name resolution
In addition, the auto-updater will reinstall certain packages even if you removed them manually.
Apart from that, everything is great. The 12 LEDs on the front can all be individually colored and can be either left to be controlled by the hardware (except for the PCIe and user-defined LEDs) or have triggers manually specified.
The device easily has enough horsepower for the purposes of a networking device, and there is a 2GB RAM upgrade available. As for networking, the main switch (the 5 LAN ports) has two connections back to the CPU, allowing for more bandwidth on topologies with multiple internal networks. The WAN port automatically switches between TP and SFP, allowing you to connect to certain fiber ISPs without a modem or interface converter.
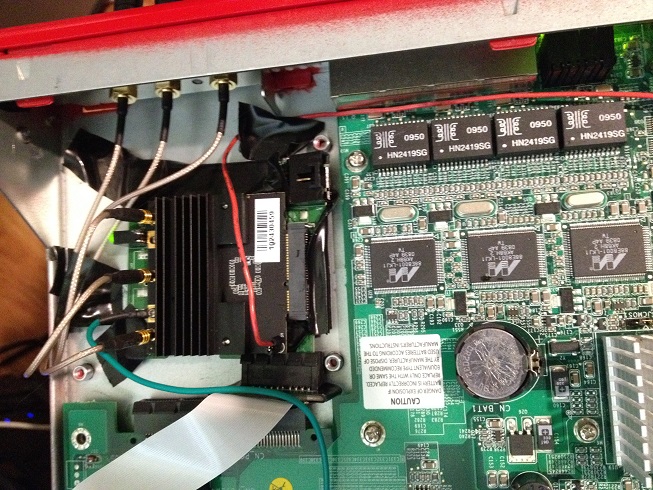
The system provides three miniPCIe slots, with the one closest to the CPU supporting mSATA and the one furthest away supporting a SIM card. The middle slot is pre-filled with the full-length 2.4/5GHz Wifi card, with the one closest to the CPU having the half-length 2.4GHz-only card. This means that if you want to use a third full-length card or cellular card, you’re good to go. However, if you want to use an mSATA drive, you’ll need to move the 2.4GHz card to the SIM slot. This entails taking the entire board out of the case, since you’ll need to move the mPCIe standoffs from half-length to full-length and vice versa, which requires taking the board out of the case. You might have to do that anyway if you aren’t careful, as I was able to make one of the standoffs come unscrewed simply by trying to remove the card. Other users have also reported some lose screws.
The case itself has five holes for bulkhead-mount pigtails/antennas. It comes with three 2.4/5GHz antennas, with the outer two using signal combiners/diplexers to run on both 2.4GHz and 5GHz, with the inner antenna being 5GHz only. You can use the extra two antenna holes to add extra antennas for a third band or a cellular modem, or just add dedicated 2.4GHz antennas rather than using diplexers. However, this might prove to be insufficient antenna holes when 4×4 MIMO hardware becomes more commonplace (Compex has a card in the works, but it’s currently in pre-order, and only then it doesn’t include an RF shield). Still a downgrade from the 16 antenna holes on my RSPro case.
The board also provides plenty of headers to use. 10 GPIO lines, 2 UARTs, JTAG, and a 12/5/3.3v header which could be used to power a hard drive (assuming it supports enough current). It also has 2 USB 3.0 ports, a nice step up from the RSPro’s single USB 2.0 port.
One very useful feature is schnapps, which is a program that manages BTRFS snapshots. You can make use of the second reset mode (hold the reset button until two LEDs light up) to reset to the latest snapshot. This allows a faster option to get the router up and running in case of locking yourself out, but you lose the ability to drop into a rescue shell to fix the problem non-destructively. In addition, resetting with 3 LEDs on reverts to the factory snapshot. If it’s still hosed, mode 4 allows for a reflash from a USB drive, while 5 LEDs enables a recovery shell via UART. This has several advantages over the more traditional squashfs root + RW overlay, but has the disadvantage of not having compression. It also keeps the kernel in the filesystem and allows it to be updated, something that you would normally have to reflash for.
Overall, I’d give it a 9.5/10. Only things stopping it from being a 10 are the aforementioned software bugs, and a possible lack of future expandability as M.2 replaces mPCIe. I ran into the same issue with the RSPro and its miniPCI slots, but the difference here is that mPCIe to M.2 adapters are readily available, cheap, and still offer enough bandwidth (500MB/s per slot with the Omnia’s PCIe 2.0) compared to the much less common miniPCI to miniPCIe adapters which would be a bottleneck anyway once Wifi starts breaking gigabit speeds. As for >1gb WAN connections, you might run into trouble there, but in theory, it would be possible to rig a 10GbE card up to the Omnia and still have it operate at 4gb/s.